Homebrew Robotics
Homebrew Robotics: Building an Open-Source, Affordable Robotics Ecosystem
Homebrew Robotics aims to create a marketplace for robotics data and software, leverage AI to streamline programming and translate voice commands to action, and ultimately develop an affordable robot with custom hardware, supported by specialized packages and data.
Executive Summary
“Humanoid robots are the next great leap forward. They're going to be part of everyday life and we need to build the infrastructure to support them.”
Short-term: Homebrew Exchange. A Robotics Data and Package Marketplace
- Launch a marketplace where developers can access and share robot sensor/performance data and software tools to enhance robot functionality.
- Enable external developers to monetize their robotics packages or create custom packages for robotics companies, earning money for their contributions.
- Allow robot owners to upload and sell sensor data (e.g., GPS, IMU, force/torque, etc.) to those using data to improve algorithms.
- Onboard Baby Brewie robot for various proof of concepts/package integrations.
Medium-term: AI-Assisted Programming, Voice-to-Action & Expanded Hardware Support
- Introduce AI-driven tools to help developers write code for various robot frameworks (e.g., ROS) more efficiently, speeding up robot development.
- Introduce AI-driven tools that translate voice commands into executable actions, identifying and accessing the necessary libraries and logic to perform complex tasks.
- For example, a command like “Baby Brewie, go to 7-11 and buy me coke”
- Expand platform compatibility to support additional hardware stacks, including larger humanoid robotics models popular in the market, offering greater flexibility.
Long-term: Develop Our Own Affordable Humanoid Robot
- Taking inspiration from iCub, an open source robot, we will develop our own affordable robot, integrated with a custom hardware stack designed for cost-efficiency.
- Tailor our marketplace to support this hardware by offering specialized packages and data, making advanced robotics more accessible to a wider audience.
Short-term: Robotics Data and Package Marketplace
The goal of the short-term phase is to create a marketplace where developers can share and monetize robot sensor data and software tools, enabling robot owners to sell data for algorithm improvement, while onboarding the Baby Brewie robot for proof of concepts and package integrations.
Current Landscape
The robotics data and software landscape is fragmented, with developers using a mix of proprietary and open-source solutions which result in limited out-of-the-box functionality.
The ROS Index is the most extensive (and one we use often!), but lacks monetization and revenue generation, is specific to ROS, and lacks communities around emerging robotics suites like NVIDIA's Gr00t.
Want your robot to dance out-of-the box? That requires additional integrations and engineering.
| Company | Out-of-the-Box Functionality | Limitations |
|---|---|---|
 Figure | Basic mobility (walking, balancing), object manipulation (simple pick and place), basic human interaction. | Advanced tasks (complex manipulation, advanced interaction) require additional software integration. |
 Unitree | Basic mobility (walking, running, terrain navigation), simple object interaction, and following commands. | Full humanoid functionality (e.g., intricate manipulation or advanced human interaction) not available. |
 Boston Dynamics | Advanced mobility (dynamic movements like running, jumping, backflips), balance and stability, pre-programmed actions. | Lacks autonomous decision-making; custom AI for navigation and manipulation required for real-world tasks. |
 iCub | Basic movement (walking, sitting, balancing), cognitive learning (sensor integration for interaction and manipulation). | Primarily research-focused; complex cognitive tasks and autonomous interaction require extensive development. |
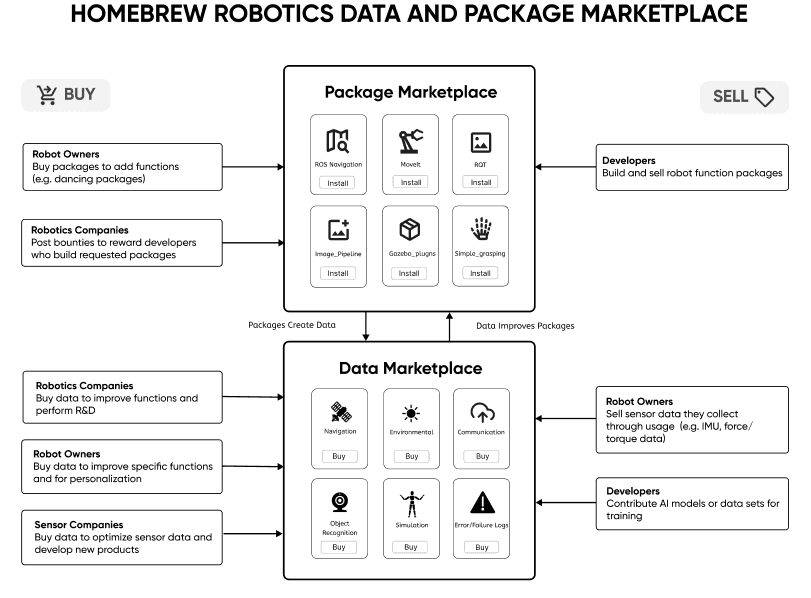
The Homebrew Exchange: Robot Data and Package Marketplace
The exchange consists of a package marketplace and a data marketplace designed to ensure there is sufficient data to train package algorithms and optimize performance.
Exhibit: the dance moves featured in iShowSpeed's video are not available as a public package.
Robotics Package Marketplace: Increasing ‘out-of-the-box’ functionality of humanoid robots
Robotics startups often prioritize hardware design and manufacturing over software and integrations. Many of these startups have closed-source communities for trading software packages, but these lack incentivization.
The solution is a marketplace platform with:
- Monetization Capabilities: Tools that allow developers and startups to monetize their software packages through licensing, subscriptions, or one-time purchases, creating a sustainable revenue model.
- Support for Multiple Operating Stacks: A platform that accommodates various robotics operating systems, such as ROS, Groot, NAOqi, and others, allowing seamless integration of software packages across different hardware stacks.
- Bidding Area for Robotics Packages: A space where robotics companies can define software package requirements and set a payment, allowing the community to propose and develop the solution.
- Distribution Channels: A system that enables developers to easily distribute their software packages to a wide range of users, ensuring global reach and seamless updates.
Homebrew Exchange creates the platform and incentives for a strong two-sided marketplace by providing an open platform for sharing, monetizing, and integrating software.
Sensor Data Marketplace: Providing data to optimize and enhance robotic packages
The Sensor Data Marketplace on Homebrew Exchange provides a centralized platform for developers and robotics companies to access high-quality sensor data, enabling them to train and enhance their robotic packages.
There are numerous companies focusing on datasets in autonomous navigation and object detection - however, few are focused on robotics and even less on humanoid robots.
Exhibit: Public datasets focused on robotics or robotics navigation
| Dataset | Focus Area | Contribution Info |
|---|---|---|
| FrodoBots 2K | Robot motion and navigation – A dataset focused on training robots to perform various motion and navigation tasks using real-world sensor data like LIDAR, cameras, and IMUs. | FrodoBots 2K Dataset |
| KITTI | Autonomous driving and visual odometry – Provides data for visual odometry, stereo images, LIDAR, GPS, and radar, widely used in the development of autonomous driving systems. | KITTI Dataset |
| COCO | Object detection, segmentation, and captioning – A large-scale dataset used for training robots in object detection, segmentation, and generating descriptive captions. | COCO Dataset |
| Dex-Net | Robotic grasping and manipulation – A dataset providing 3D models and force/torque sensor data for robotic systems learning to securely grasp and manipulate objects. | Dex-Net Dataset |
Humanoid robots will require more extensive datasets guiding complex actions in unknown environments across a diverse range of hardwares - Homebrew Exchange provides this.
In the "short-term" we will focus on attracting robust data in the following categories:
General Physics Data from Humanoid Robotics Hardware - Data on force, torque, and kinematic feedback from humanoid robots performing tasks like walking, balancing, and manipulation.
Why Helpful: Enhances robot locomotion, balance, and task execution, making robots more adaptable in real-world environments. These could focus on well known hardware's like Unitree and also allow smaller startups to develop community run datasets.
Cross-Domain Human-Robot Interaction Dataset - Data on speech, gesture tracking, emotional cues, and contextual interactions in environments like homes, workplaces, etc.
Why Helpful: Improves robot communication and collaboration in different settings, vital for personal assistants and healthcare robots.
Multimodal Sensory Feedback Dataset for Grasping - Data combining RGB images, depth maps, force/torque sensors, and tactile feedback during manipulation tasks (e.g., grasping, lifting).
Why Helpful: Enhances robot manipulation skills, enabling delicate and precise object handling in complex environments.
Robotic Perception Dataset for Object and Context Understanding - Data for object recognition (cameras), spatial arrangements (LIDAR), and contextual annotations (IMUs).
Why Helpful: Helps robots understand objects and their context, improving interaction in dynamic environments like homes and offices.
Advanced Human-Robot Collaborative Task Dataset - Data on joint actions, coordination, timing, and human feedback during collaborative tasks.
Why Helpful: Improves human-robot team coordination in tasks like assembly, healthcare, and service applications.
Note, the core team will be working on various navigation and GPS to hardware integrations as many hardware stacks do not have GPS modules which hinders path planning.
Homebrew Exchange seeks to provide a collaborative environment and incentive system to promote the formation of rich datasets in the above topics…and more.
Medium-term: AI-Assisted Programming, Voice-to-Action Translation & Expanded Hardware Support
The AI-assisted programming tool would use the Homebrew Exchange marketplace to suggest and auto-generate code that integrates specific software packages and sensor data from the marketplace, making it easier for developers to build and optimize robotic systems.
AI Assisted Programming: Increasing Developer Efficiency
AI-assisted coding tools, like GitHub Copilot and IntelliCode, automate tasks such as code completion and debugging, boosting developer efficiency. These tools provide context-sensitive suggestions, reduce troubleshooting, and simplify development, which could enhance productivity and accessibility in ROS.
To create these tools, we would need:
- AI Model and Data Training: Train the AI model on a large dataset of ROS code and best practices, incorporating community feedback to align with ROS standards.
- ROS-Specific Plugin Development: Develop an IDE plugin (e.g., for VSCode, PyCharm) to integrate the AI tool into ROS workflows with real-time suggestions.
- Integration with ROS and Simulation Tools: Ensure compatibility with ROS packages and enable AI-driven optimization and testing within Gazebo.
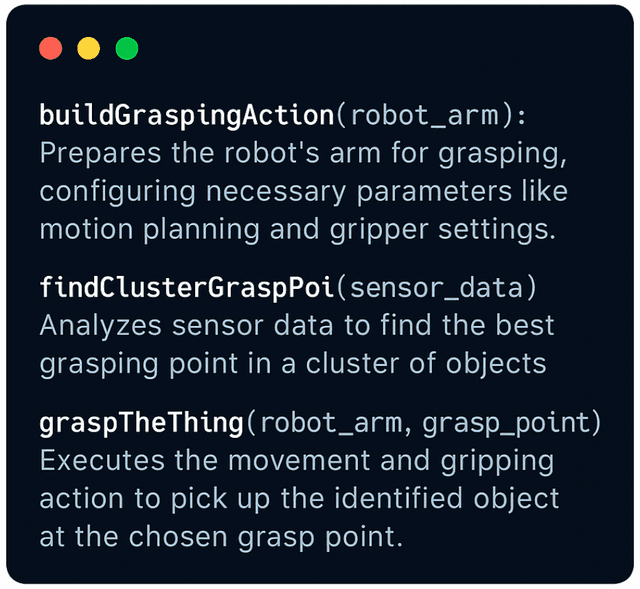
Exhibit: An AI-assisted coder would automate grasping strategy suggestions, generate code for arm movements, and adapt to dynamic environments based on task context in real time. It would also search, suggest, and optimize the package and nodes within the package.
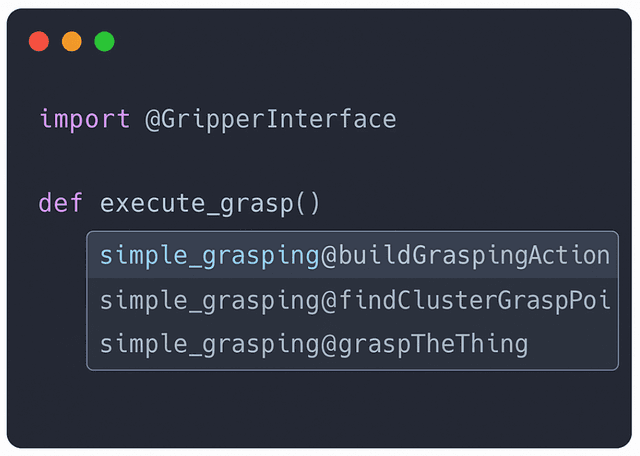
AI Assisted Task Execution: Enabling Complex Task Execution via Voice
AI-assisted task execution tools use voice commands to trigger workflows, calling multiple packages and libraries. They interpret natural language instructions, automate processes, and enable efficient execution across robotics components. To create AI-assisted task execution tools, we would need:
- Training AI for Task Understanding: Train the AI model on a diverse set of voice commands and task execution scenarios, enabling it to accurately process and act on complex instructions.
- Voice Command Integration: Develop a voice command interface that integrates with various robotics packages, enabling seamless communication between the AI model and the robotic system.
- Execution Workflow Design: Ensure the AI can orchestrate multiple packages and systems, triggering the appropriate actions across different components to perform complex tasks.
Example workflow: The following workflow would take place in order to execute the voice command "Baby Brewie, go to 7-11 and buy me a coke."
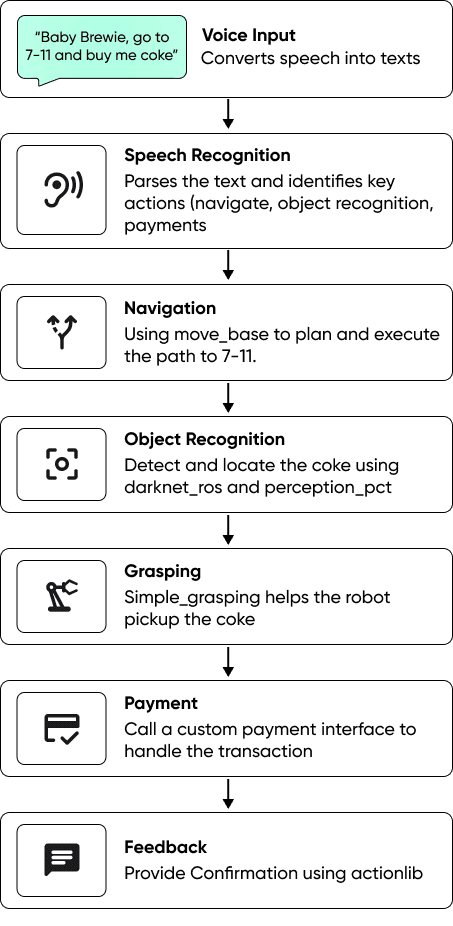
This is the Copilot moment for robotics - Like GitHub Copilot simplifies coding, AI-assisted task execution in robotics will allow anyone to trigger complex tasks with voice commands. This will make robots accessible to non-experts, enabling actions like navigation, object recognition, and transactions.
Expanded Hardware Support: Larger Humanoids With Market Leadership
In the medium term, we’ll expand our hardware support to ensure compatibility with a broader range of robotic platforms, enabling greater flexibility and scalability for diverse applications. This expansion means that the core team will acquire new hardwares, build bespoke packages, and do integrations directly.
Long-term: Develop Our Own Affordable Robot
Full sized current commercial offerings: Expensive with limited availability
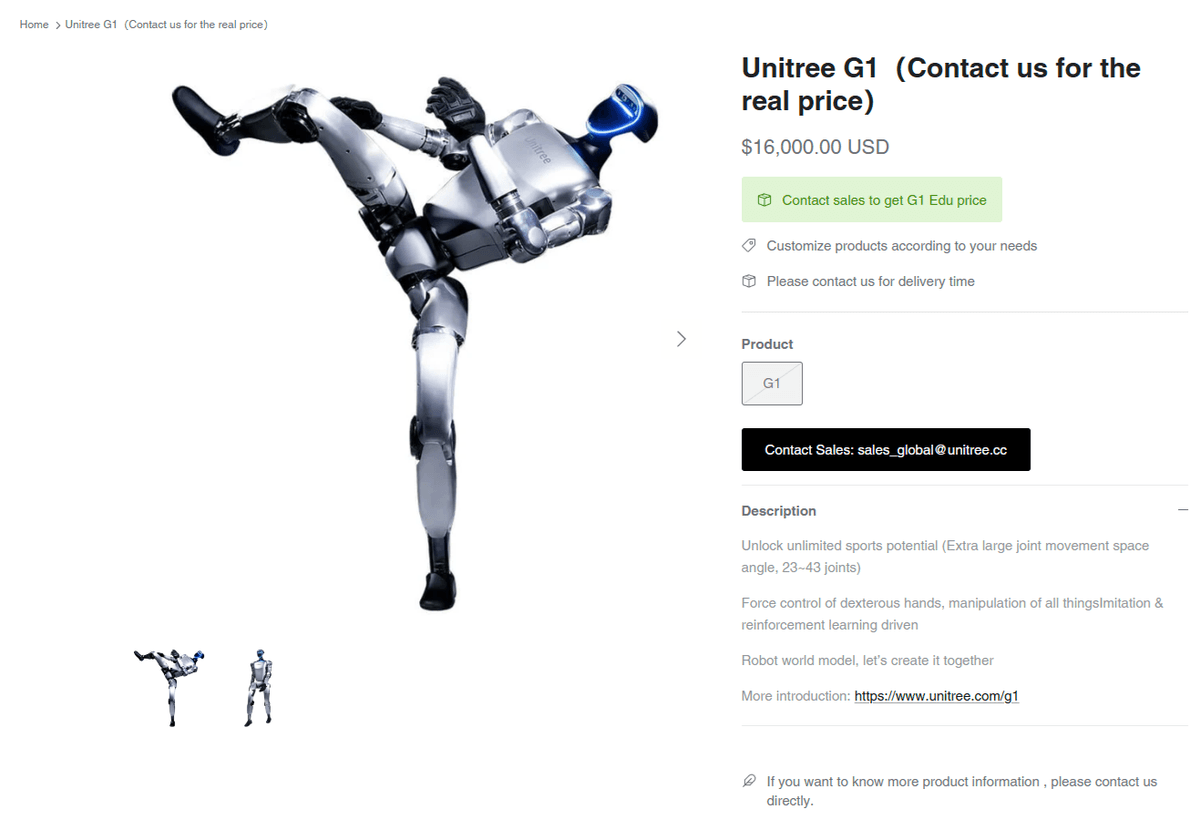
On the market offerings of humanoid robots are often not accessible or affordable for most consumers, with prices ranging from USD$8,000 to over USD$100,000.
Exhibit: Unitree’s G1, released in 2022 retails for USD$16,000; the new H1 Unitree model retails for upwards of USD$80,000.
Research-focused robots: Available but high friction to produce
Beyond current on-market options, there are research focused humanoid robots like the iCub Humanoid Robot. iCub was developed by the Italian Institute of Technology for research purposes.
Exhibit: iCub designs are open-source and publicly available.
Smaller Humanoids: Useful for learning and package development, limited by size
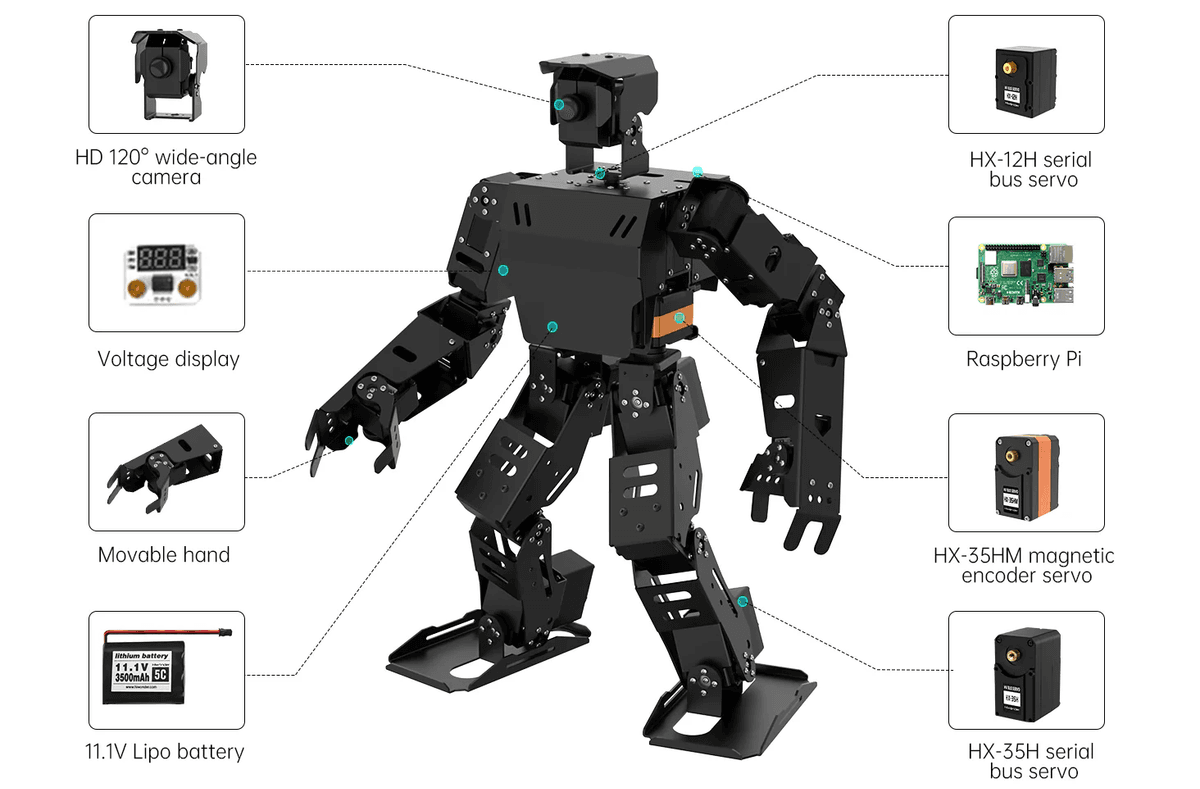
Our own Baby Brewie uses a similar value chain (ROS, Gazebo, similar sensors) as the large humanoid, commercially available robots. Baby Brewie is essential to the go to market of Homebrew Robotics as he allows new roboticists to be onboarded to package building and generation at a low cost.
However, Baby Brewie is limited by being less than 1 meter tall with limited motor strength needed to perform complex tax or long-duration activities.
Exhibit: Baby Brewie throwing a projectile
Homebrew develops its own full-scale Humanoid Robot at efficient price point
The vision for a Homebrew-created full-size humanoid robot at an affordable cost is to democratize access to advanced robotics, enabling widespread use in education, research, and personal assistance, while driving innovation across industries through accessible, customizable solutions.
To develop an affordable robot with a custom hardware stack, we will take the following approaches:
Leveraging Open-Source Frameworks: We will use ROS, Arduino, and Raspberry Pi for cost-effective software and hardware integration. These platforms provide robust tools, eliminating the need to build everything from scratch.
Modular Design: We will build with off-the-shelf components such as sensors, motors, and controllers, while utilizing 3D printing for custom parts. This approach saves time and costs in both manufacturing and prototyping.
Affordable Computing: We will use budget-friendly computing units like the Raspberry Pi and Jetson Nano for processing and AI tasks, ensuring our system can handle robotics applications at a fraction of the cost of traditional hardware.
Simplifying Functionality: We will focus on core robot capabilities, such as basic mobility and simple task execution, and will gradually add advanced features like manipulation and vision as the system scales and funding permits.
Collaborating and Crowdsourcing: We will actively tap into our Homebrew community, leveraging shared code, designs, and funding to reduce development time and costs.
This strategy will allow us to balance affordability with functionality, enabling incremental improvements while keeping initial expenses low.
Appendix
Why Baby Brewie?
Baby Brewie is not only the Homebrew Robotics mascot, but he is an essential piece of robotics hardware that the core team uses to build and test new packages, new sensor setups, coding tools, etc.
Baby Brewie’s smaller size, affordability, and use of open source frameworks like ROS (general framework), Gazebo (simulation environment), OpenCV (image processing), and Rasberry Pi compute are an ideal foundation for larger scale, affordable, robots.
Plus, he’s a lot of fun to work with and will be used in upcoming hackathons in order to build our Homebrew community.